TKO Circuit Simulator
Award-winning cross platform app that allows for building and simulating FRC electronics in real time.
Download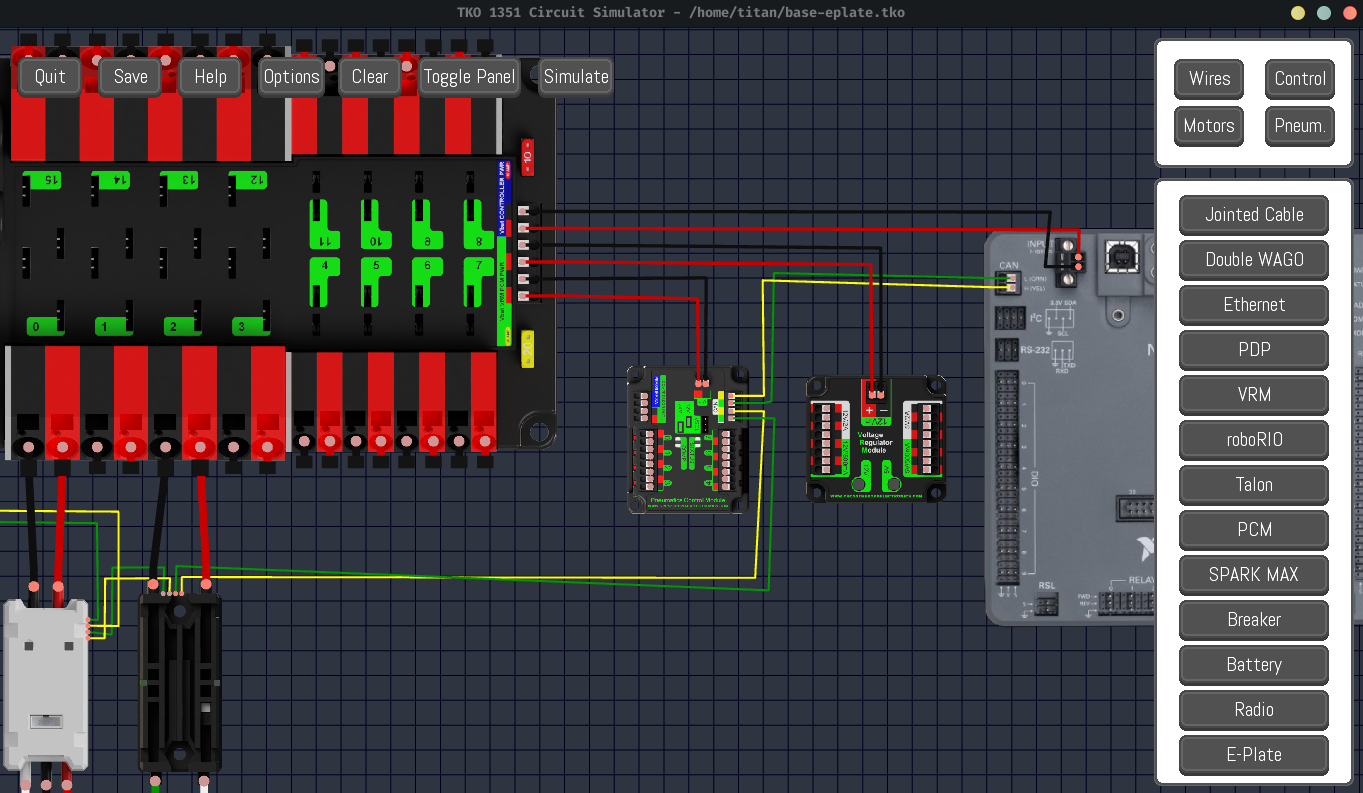
Award-winning cross platform app that allows for building and simulating FRC electronics in real time.
Download

The simulator can be used on any device with Java installed, creating opportunities for learning at home.
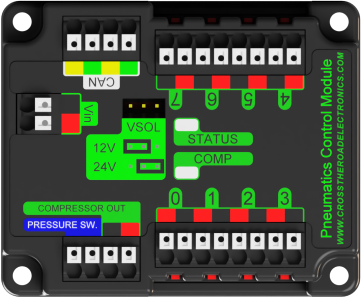
Rendered from CAD files, every device is an accurate representation of the real FRC hardware, with ports and LEDs.

A simple yet powerful user interface allows anyone to diagram a basic robot e-plate in only 15 minutes.
Winner of the Software Engineering Award at KLA RoboGames 2021!
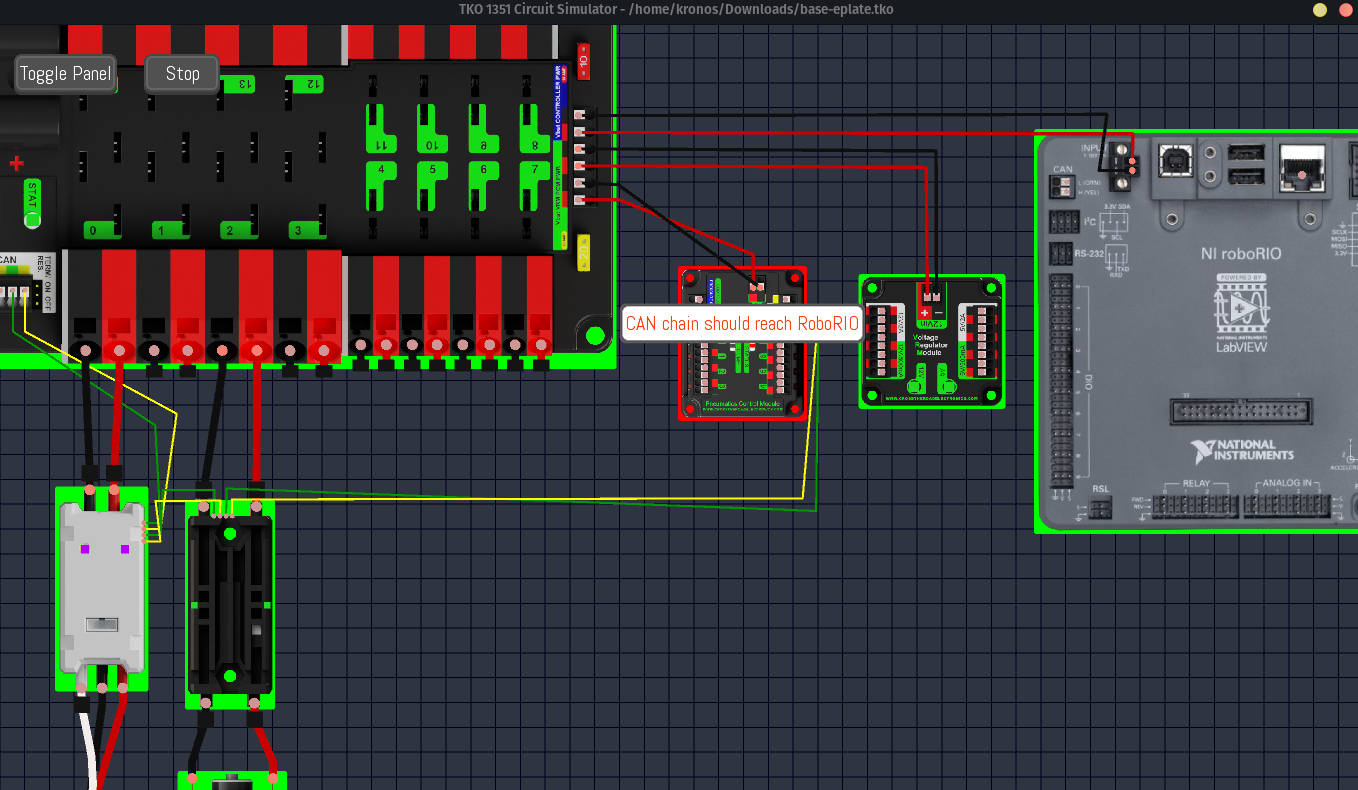
The simulation features allows users to check if components are wired correctly. If a device will not function properly, it gives the user the reason.
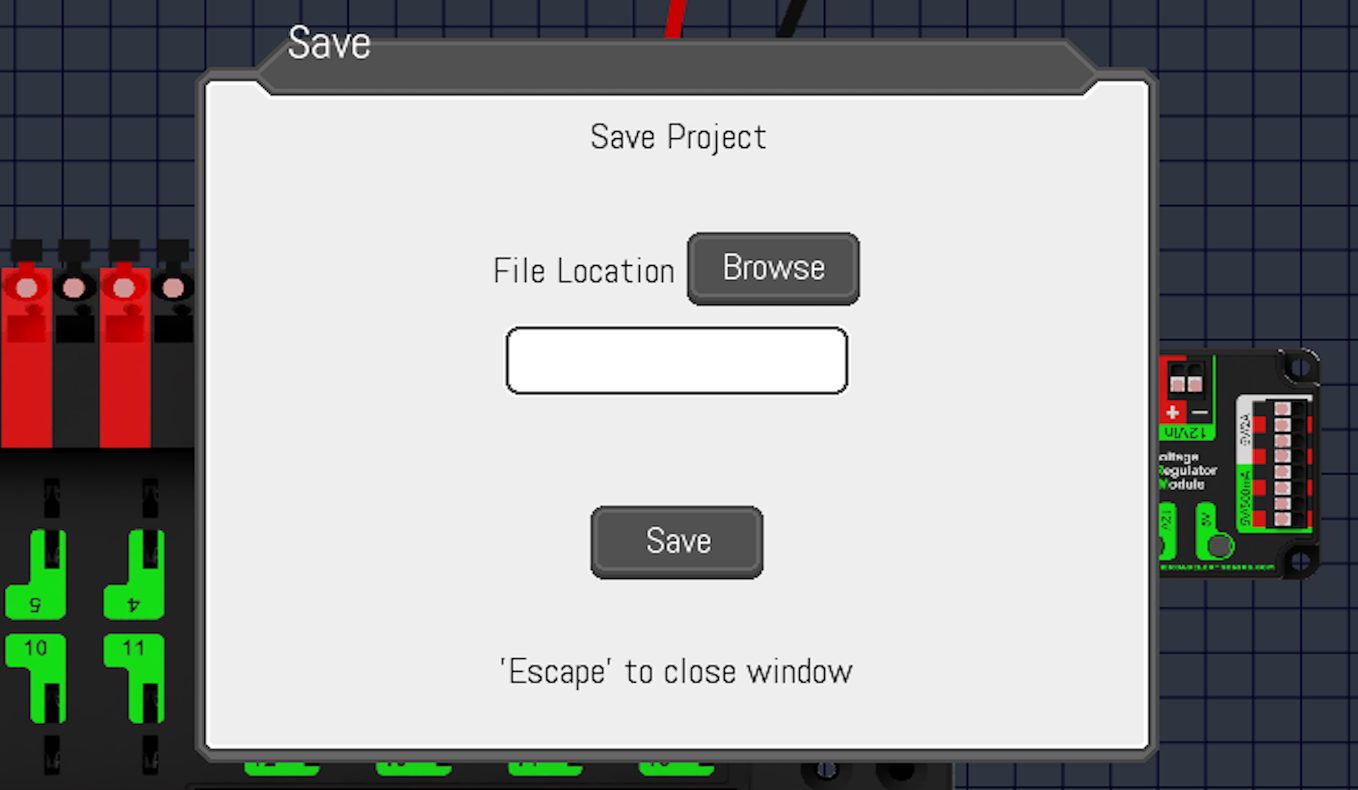
All circuits can be saved to a file (often only a few MB in size), and these can be imported into the simulator again later, even if the simulator is running on a different device.
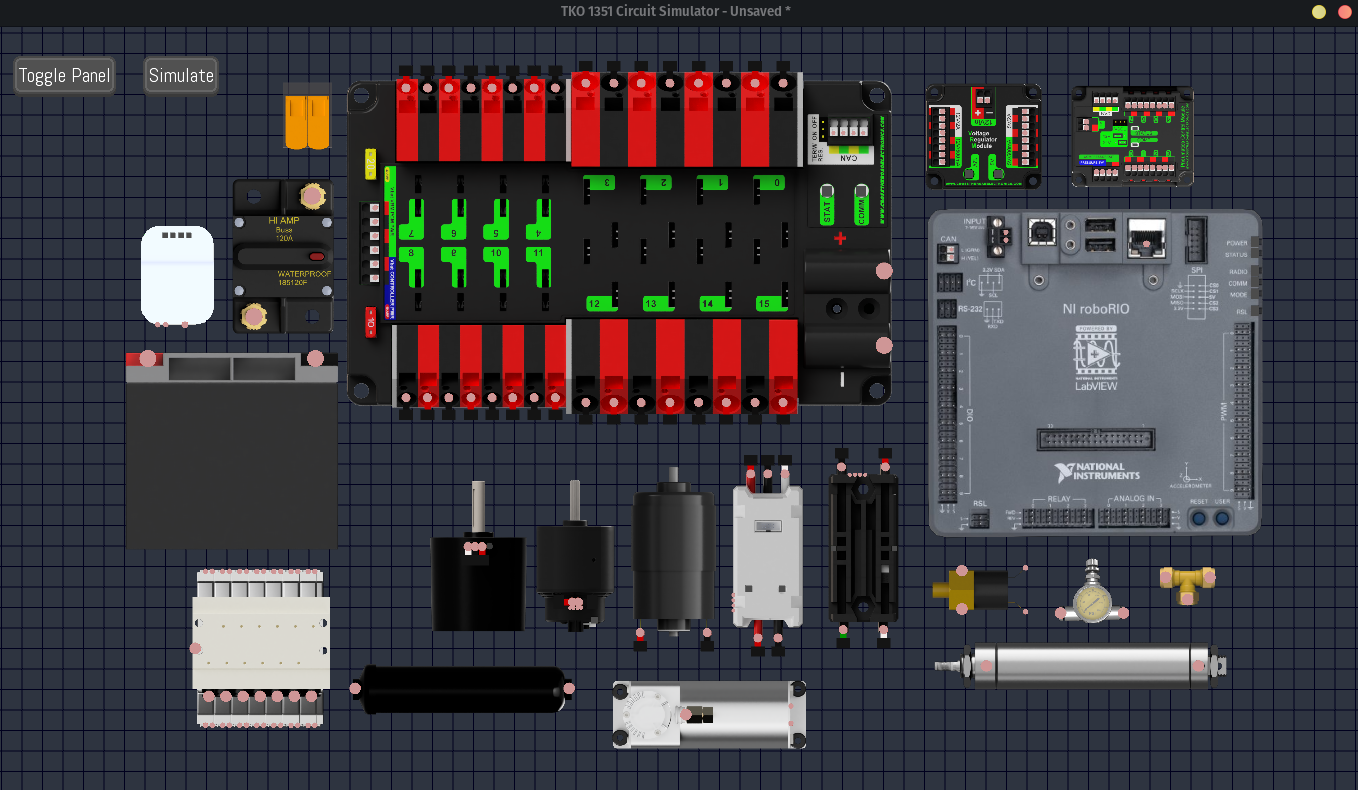
All commonly used FRC components are included, including the PDP, RoboRIO, motors, motor controllers, pneumatics, etc. The full component list can be found on GitHub.
All code for the simulator is open source under GNU AGPLv3.
Enable hardware acceleration and run with a dedicated graphics card for optimal performance.
Please report any fatal bugs over on the GitHub!
Universal binaries (.jar) and source code is provided in the release for other Linux distributionse.